Quori
Quori

Quori v2
Advanced modular social robot with touchscreen, enhanced sensors, and 14-DOF articulation
In Progress
In Progress
DESCRIPTION
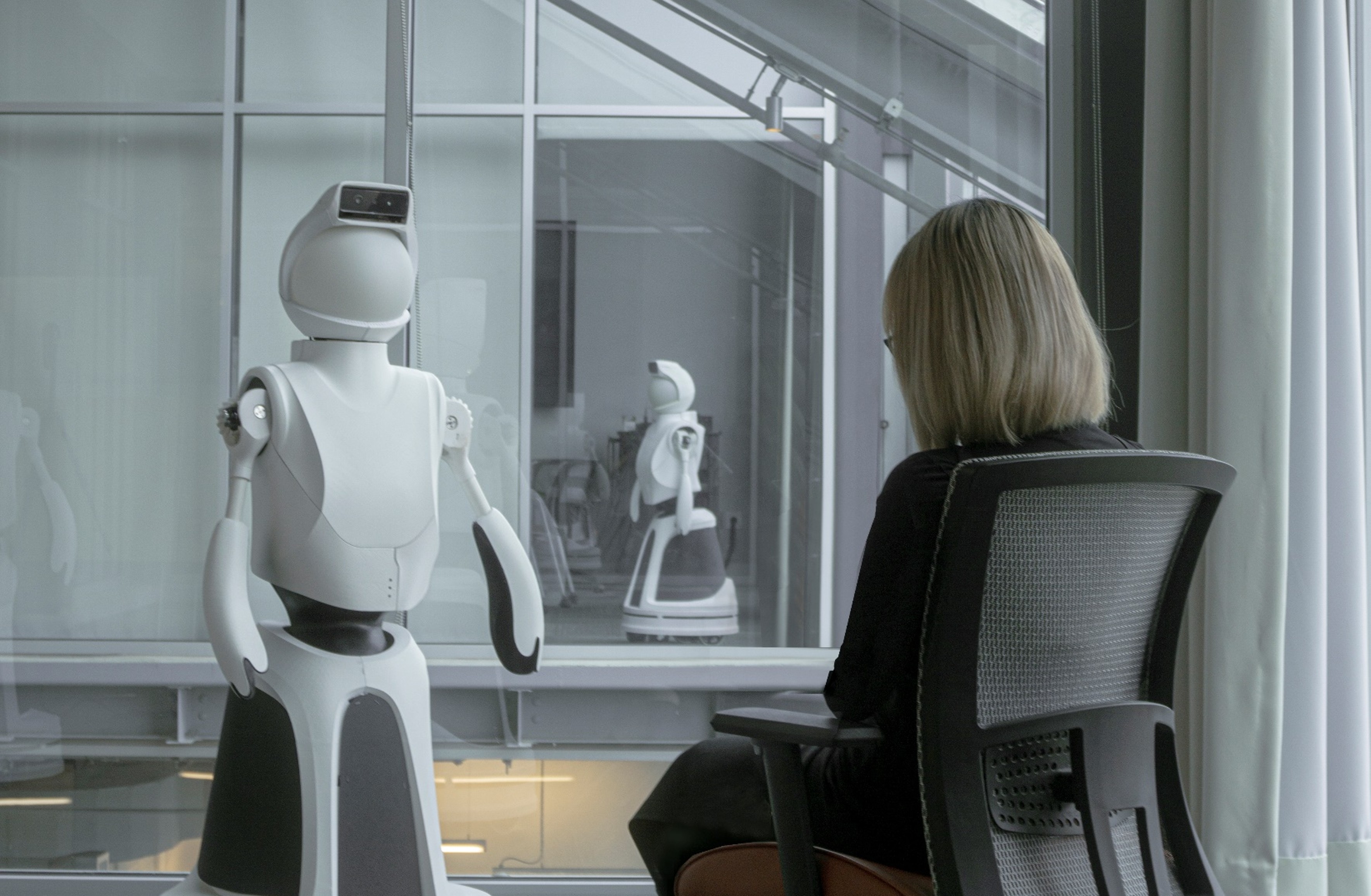
An advanced modular socially interactive robot platform with enhanced sensing and interaction capabilities. Features a touchscreen display, dual speakers, 14-DOF articulation including 4-DOF arms, multiple IMUs and laser rangefinders, programmable light arrays, and 3-DOF holonomic mobility.
ORGANIZATIONS
CONTRIBUTORS
Prof. Mark Yim
Principal Investigator · Asa Whitney Professor of Mechanical Engineering

Prof. Bill Smart
Co-Investigator · Professor
PN
Prof. Naomi Fitter
Co-Investigator · Assistant Professor

Dr. Ross Mead
Co-Investigator · Founder and CEO

Prof. Simon Kim
Co-Investigator · Associate Professor in Architecture / Design Principal
Lead:OSU
Supporting:3 orgs
Contributors:5 people
Category:Social Robot
SPECIFICATIONS
Height
1.35 meters (resting position)
Weight
Approx. 45-50 kg
Battery
Onboard rechargeable battery system
Sensors
RGB+D camera, Microphone array, Laser rangefinders (x2), IMUs (x4)
Actuators
14 DOFs total, 2-DOF head, 1-DOF neck, 4-DOF arms (x2), 3-DOF holonomic base
Compute Platform
Onboard computer
KEY FEATURES
Touchscreen display for interactive communication
Dual speakers for enhanced audio output
Two articulated arms with 4 DOF each for complex gestures
2-DOF head with 1-DOF neck for expressive movements
3-DOF holonomic base for smooth omnidirectional mobility
Dual laser rangefinders for precise navigation
Four IMUs for enhanced motion sensing and stability
Four programmable light arrays for visual feedback
Onboard storage bin for carrying items
Customizable badge for personalization
Enhanced modular design and functionality
ROS-based control interfaces at multiple abstraction levels
Browser-based content creation and animation tools
Related Hardware
Explore similar robotic platforms